Motion Generation Library
Reusable C++ and Python library for analytical trajectory generation with linear, parabolic, cubic, quintic, trapezoidal, jerk-limited double-S, and waypoint spline profiles for robotics and CNC applications.
View on GitHub
Planning Algorithms Library
From-scratch C++ implementations of RRT, RRT*, RRT-Connect, PRM/PRM*, FMT*, BIT*, and RABIT* with a unified interface, obstacle handling, test coverage, documentation, and optional Python bindings.
View on GitHub
State Estimation Library
Compact, robotics-oriented C++ estimation framework implementing Bayes filter recursion, KF/EKF/UKF, particle filtering, and Gauss-Hermite Gaussian filtering with pluggable process and measurement models.
View on GitHub
Diffusion Models Platform
PyTorch DDPM research platform with configurable U-Net diffusion models, Gaussian diffusion utilities, AMP+EMA training pipeline, sampling scripts, and trajectory visualization for forward and reverse diffusion dynamics.
View on GitHub
RL Projects Platform
Hands-on reinforcement learning implementation suite covering dynamic programming, Monte Carlo, temporal-difference learning, DQN/DDQN, policy gradients, actor-critic methods, and model-based planning.
View on GitHub
Lagrangian Neural Network Platform
Research platform for LNN/DeLaN/FeLaN dynamics modeling with reproducible training workflows in PyTorch and JAX, including double-pendulum baselines and Pinocchio-based dataset generation.
View on GitHub
Robot Viewer
Full-stack robot model visualization tool with a FastAPI backend and React/TypeScript frontend for parsing and exploring URDF, MJCF, and USD robot descriptions directly in the browser.
View on GitHub
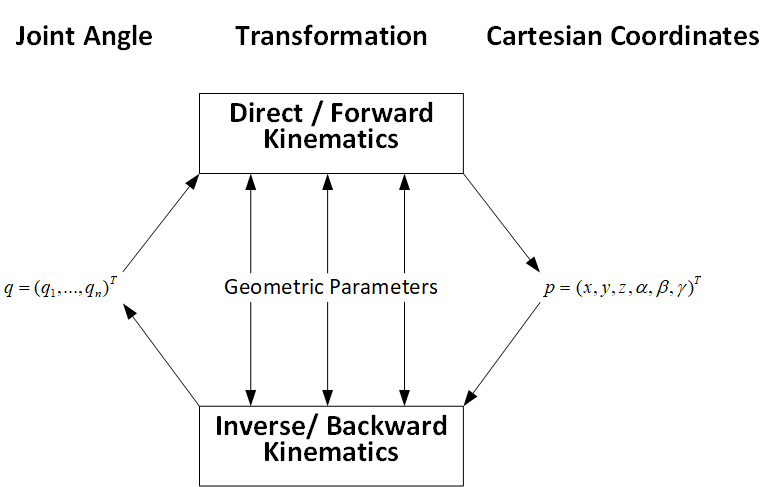
Advanced Inverse Kinematics
Implemented an iterative redundancy-resolving 7-DOF inverse kinematics solver using pseudo-inverse Jacobians, null-space projection, and secondary task optimization for robust motion execution.
View on GitHub
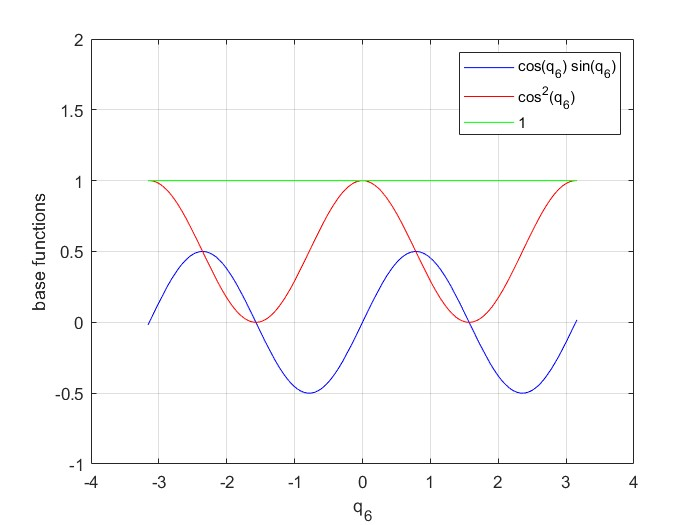
Research Project Thesis: Condition Number Optimisation
Designed and optimized excitation trajectories to minimize regressor condition number, improving identifiability and numerical robustness in robot inertial parameter estimation.
View on GitHub
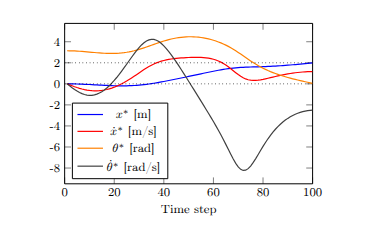
Seminar: Differential Dynamic Programming
Analyzed and presented the paper on online trajectory optimization for synthesizing and stabilizing complex behaviors using Differential Dynamic Programming.
View on GitHub
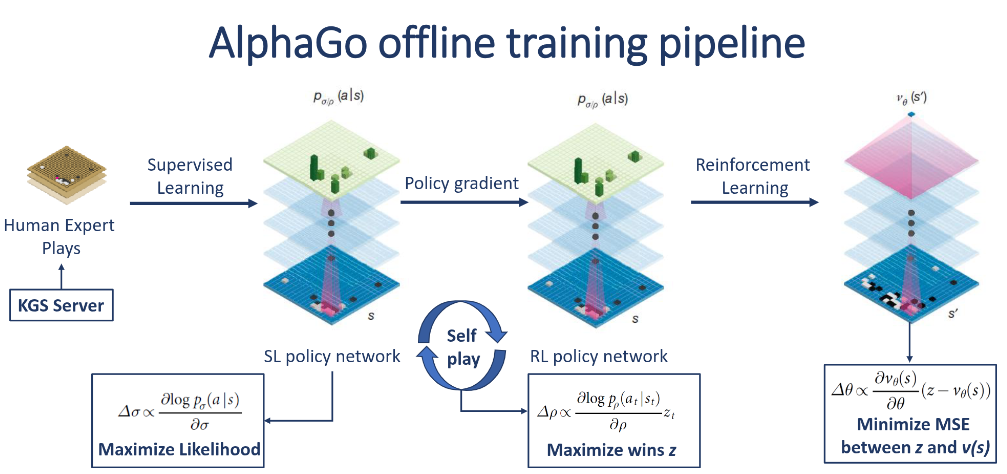
Seminar: Review on the AlphaGo RL algorithm
Studied and presented DeepMind's AlphaGo pipeline, focusing on policy/value networks, Monte Carlo Tree Search integration, and reinforcement learning strategy improvement.
View on GitHub
Seminar: Ethics in AI and Robotics
Evaluated ethical implications of AI-driven robotics systems, including responsibility, safety, transparency, and human impact in autonomous and learning-enabled control.
View on GitHub
